


Tools and Sampling
Tools and Sampling
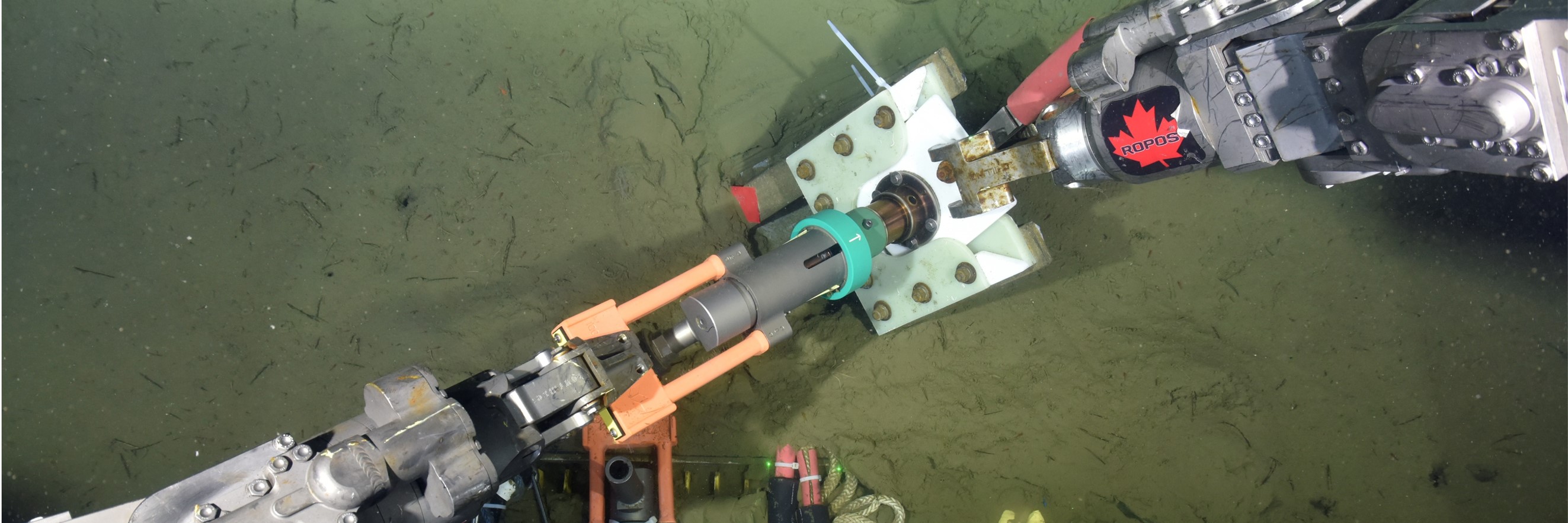
A tool belt you can count on
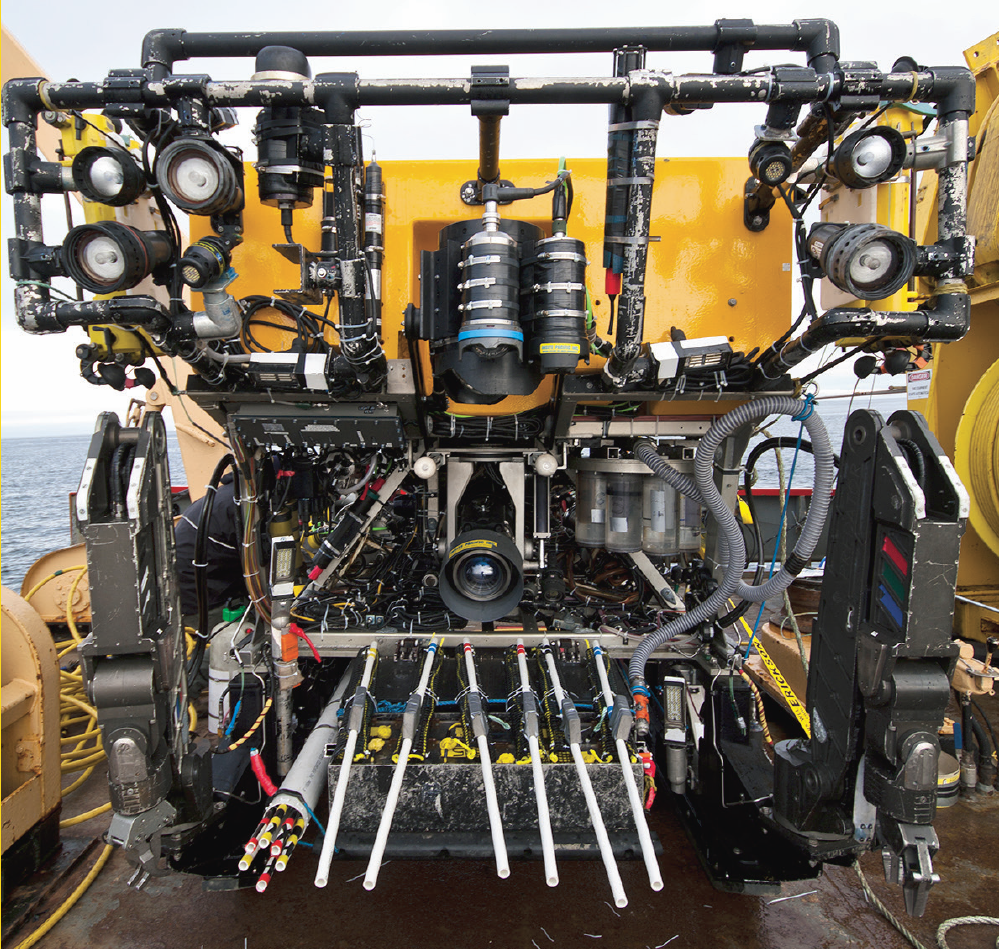
ROPOS and its operators have built their reputation on the successful development, implementation and use of complex scientific and engineering tools for a wide range of seafloor tasks. From the brute strength of rock-cutting submarine chainsaws or jetting pumps to the most complex and delicate scientific apparatus, ROPOS has “done it all” and is always ready for a challenge.